


Mvision at Heavent 2018
Show design: Vincent Nast – Ze Boite
Show encoding: Renaud Gindre – Pixels Services
Robot: Max by Cine Motion Lab
![]()
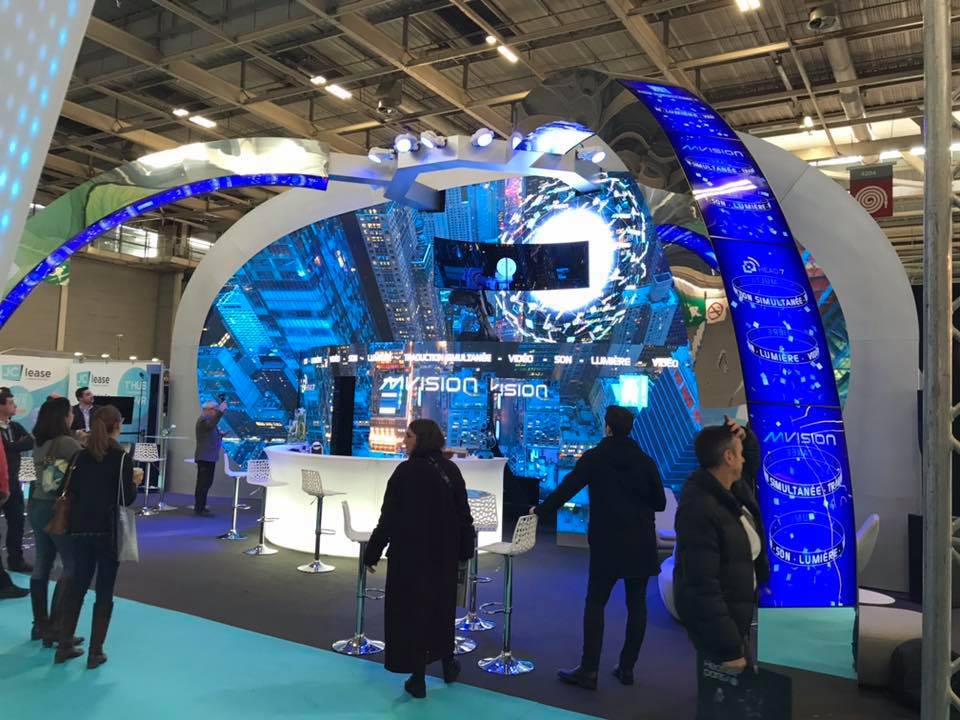
Mvision at Heavent 2018: the company dazzles attendees with a spectacular set using Modulo Kinetic
Machinery, curved screens and LED walls were used to create a ballet of screens displaying content synchronized in real time. To create this amazing show, the teams at Mvision relied on Modulo Kinetic, the all-integrated media server solution developed by Modulo PI.
A leader in the live-event industry for 15 years, Mvision has been an exhibitor at Heavent every year since its creation, always with a booth reflecting its teams’ expertise and their state-of-the-art technical equipment.
Ze Boite, in charge of content creation, imagined a dynamic and interactive show around the impressive Max Robot from CINE MOTION LAB, a LED wall, and 20 curved OLED screens (18 for arches on each side of the booth and 2 mounted on the robot’s head).
The original set-up was designed especially for Heavent, and came with a few challenges: Vincent Nast, managing director of Ze Boite, explains: “ I wanted the content to move seamlessly between the archway screens and the robot’s head screens. We needed a media server behind all this, and I immediately thought of Modulo Kinetic to create this set-up that had never been done before.”
To bring this show to life, Vincent Nast worked closely with Renaud Gindre, an expert in Modulo PI video solutions. Modulo PI and Cine motion Lab also worked together to make sure the two machines could communicate with each other: Modulo PI developed a special device for Modulo Kinetic to receive position and orientation data from the robot’s tool, while Cine Motion Lab developed a special software for the robot to send information in real time.
The result of all this collaborative work was a seamless symmetrical connexion between the two machines, which could both trigger actions from each other. Then, the nodal interface of Modulo Kinetic allowed to easily patch the robot’s data to the 3D scene’s parameters.
“We managed to establish a real dialogue between Modulo Kinetic and the robot, with the position and orientation data on 6 axes sent every 5 milliseconds. This allowed for clinical precision when following the robots coordinates”, adds Vincent Nast, “and gave us the opportunity to use the position data as triggers for streaming media, or animate in real time a 3D model preloaded in Modulo Kinetic. In the 3D model, we created a virtual camera on the robot’s tool and displayed the camera’s point of view on the screens mounted on the robot’s head”.
Three 3D scenes were created for the show: one for the background LED wall, and two more for the robot, both displaying different types of rendering. In total, 8 different show sequences were made available, all playable via an iPad on Mvision ‘s booth: “We relied on Modulo Kinetic capabilities to create a special remote user interface on an Ipad. We created tasks to trigger the stream of media or robot’s movements.” explains Nast.
Although Ze Boite was able to test the communication between the Max robot and Modulo Kinetic at Mvision beforehand, most of the robot’s programming had to be done at Heavent during build-up: “The set-up couldn’t be identically reproduced at Mvision’s warehouse as the robot couldn’t be raised, so we couldn’t test all the trajectories we wanted to use. In the end, we had to do most of it on site. I enjoyed working with Modulo Kinetic. It was the first time I used it but Modulo Kinetic is a user-friendly solution.” Nast adds : “For shows or concerts that require real-time 3D, complex media combination, or nodal programming, I now know I can rely on Modulo Kinetic and expert technicians like Renaud Gindre.”
In the end, it was a proper success for Mvision, as their booth created a lot of hype with such an original show.


